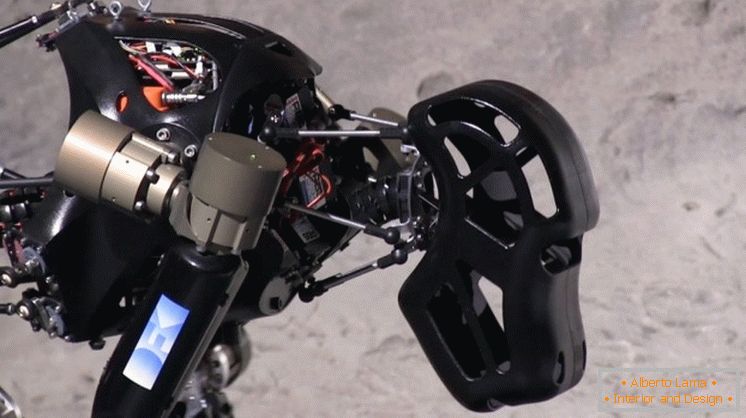
Nemecké výskumné centrum pre umelú inteligenciu (DFKI) a Univerzita v Brémach pracujú na simianskom robotovi iStruct Demonstrator, je klasifikovaný ako "vesmírny robot". Mechanické opice teraz absolvujú testy chôdze a rovnováhy v podmienkach blízkych reliéfu mesiaca.

Štúdium nebezpečných lunárnych povrchov vyžaduje použitie rôznych foriem pohybu a výskumníci z DFKI skúmajú svoje schopnosti (vrátane kombinácie nôh, kolies a húseníc). Roboty podobné opici majú určité výhody v porovnaní s kolesami, štyri body umožňujú vytvoriť stabilnejšiu polohu pri prechádzaní prekážkami alebo kopcovitým terénom. Robot môže vyvažovať na zadných nohách, aby uvoľnil predné končatiny a vykonal akúkoľvek akciu.

S novými medzinárodnými záujmami v mesačnej misii existuje možnosť, že iStruct (alebo jeden z jej potomkov) bude môcť navštíviť mesiac. Kolonizácia Mesiaca robotmi začne vývojom, ktorý sa môže vyvinúť a primerane reagovať v akejkoľvek súčasnej situácii. V tomto ohľade je cieľom projektu vybudovať "pokročilej umelú inteligenciu" a robotický systém, ktorý sa môže učiť a pohybovať sa okolo.
Robot má sklopnú chrbticu, ktorá spája kmeň a panvu a poskytuje väčšiu flexibilitu, ako aj senzor zaťaženia chodidla a členku, ktorý reaguje pri kontakte so zemou.
Medzi ďalšie funkcie patrí:
- 43 nezávislých motorov;
- Šesť ďalších FSR snímačov na otvorených častiach slúži na detekciu prekážok;
- 6-osový snímač krútiaceho momentu;
- Digitálny trojosový akcelerometer na vnímanie orientácie nohy v priestore;
- Dva teplotné senzory na kompenzáciu zmien teploty v elektronike;
- Digitálny magnetický snímač pre uhlovú kontrolu každej pohyblivej osi chodidla a členku;
Väčšina robotov už obsahuje mnohé z týchto senzorov, ale kĺbová iStruct chrbtica (ktorá môže fungovať ako šesťosový snímač krútiaceho momentu) je druhom vzácnosti pre pohybové roboty, ktoré pomáhajú pri pohybe na všetkých štyroch. Senzory v nohách a členkoch kĺbov mu umožnia udržať rovnováhu na šikmom povrchu.
V rokoch 2008 a 2009 pracoval na podobnom robote absolvent inžiniera Daniel Kuhn. Malá opičia, ktorá bola schopná jednoduchých štyroch chodníkov. Po tomto projekte začal pracovať na iStruct, ktorý má niekoľko významných aktualizácií. Ide o oveľa väčšiu hmotnosť, 18 kg (40 libier) a rozmery 66 x 43 x 75 cm (26 x 17 x 29 palcov) a tiež obsahuje 26 stupňov voľnosti a poháňané rôznymi elektrickými motormi. Projekt by mal byť dokončený v auguste tohto roku.
Môžete vidieť, ako používa svoje intelektuálne nohy a členky pri chôdzi a udržiavanie rovnováhy vo videu nižšie. Toto je malý krok pre opičia robota, ale potenciálne obrovský skok pre všetky robotiky podobného dizajnu.
chôdza
vyvažovanie
Fotogaléria Celkom 14 obrázkov